Dieser Artikel (Bad Herbie) ist kein Klassiker in dem Sinn, dass ich den so zeitlos toll finde, um ihn hier noch mal zu erwähnen. Nein, es ist schlicht so, dass ich neulich beim Aufräumen meines Webspaces wieder auf die seinerzeit extra erstellte Webseite dazu gestossen bin und die nun gelöscht habe. Aber auf der Seite war auch ein Bericht von mir, wie ich meinen „Schaukampfroboter“ geplant und gebaut habe. Das wollte ich dann doch nicht so ganz ungesichert löschen. Deswegen taucht der nun hier zusammengefasst auf (im oben verlinkten Lerigau-Artikel findet man sogar noch ein Filmchen von dem Rennen damals):
Hier werde ich nach und nach die Entstehungsgeschichte meines ersten “Kampfroboters” beschreiben. Der ein oder andere kann schon mal darüber nachdenken, warum der so heisst wie er heisst 😉
 Erster Gedanke war ja, dass wir nur 14 Tage Zeit hatten und sowas noch nie zuvor gemacht haben. Und an dem Abend, als wir das beschlossen, waren wir uns schon so weit einig, dass als Basis wohl herkömmliche “Spielzeug-RC-Autos” herhalten müssen. Also habe ich meinen Söhnen erstmal ihre Fernlenkautos abgeschwatzt, die zum Glück jeweils 27 und 40 Mhz hatten und sonst baugleich waren. Bevor ich loslegte, habe ich mich erstmal quer durch Internet gelesen und bin dabei schnell auf eine wohl recht anerkannte Seite gestossen: http://forum.mad-metal-machines.de/. Da wusste ich dann bald, was ich haben wollte. Nun ging es nur noch darum, es umzusetzen 😉 Nun habe ich mir erstmal meine Modelle genau angeschaut um zu verstehen, wie die überhaupt funktionieren. Resultat: Ingenieurskunst, die voll auf Sparsamkeit ausgelegt war. Keine Servos, keine Fahrtregler (zuvor musste ich natürlich rausfinden, dass man sowas eigentlich braucht…). Die Fahrzeuge hatten Motoren, die direkt mit der Empfängerplatine verbunden waren und an dieser war eben die Stromzufuhr und die Antenne fest. Diese Einfachheit hatte einen Vorteil für mich, nachdem ich das alles verstanden habe: Ich konnte die Steuerung für die Lenkung einfach für einen zweiten Antriebsmotor verwenden. Denn ich wollte aus den zwei Fahrzeugen eins machen und eine “Tank-style” Lenkung bauen, d.h.: Ich hatte zwei einzeln ansteuerbare Antriebsräder und brauche keine Lenkachse mehr. Dazu später mehr, einiges erklärt sich selbst auf den folgenden Bildern.
Erster Gedanke war ja, dass wir nur 14 Tage Zeit hatten und sowas noch nie zuvor gemacht haben. Und an dem Abend, als wir das beschlossen, waren wir uns schon so weit einig, dass als Basis wohl herkömmliche “Spielzeug-RC-Autos” herhalten müssen. Also habe ich meinen Söhnen erstmal ihre Fernlenkautos abgeschwatzt, die zum Glück jeweils 27 und 40 Mhz hatten und sonst baugleich waren. Bevor ich loslegte, habe ich mich erstmal quer durch Internet gelesen und bin dabei schnell auf eine wohl recht anerkannte Seite gestossen: http://forum.mad-metal-machines.de/. Da wusste ich dann bald, was ich haben wollte. Nun ging es nur noch darum, es umzusetzen 😉 Nun habe ich mir erstmal meine Modelle genau angeschaut um zu verstehen, wie die überhaupt funktionieren. Resultat: Ingenieurskunst, die voll auf Sparsamkeit ausgelegt war. Keine Servos, keine Fahrtregler (zuvor musste ich natürlich rausfinden, dass man sowas eigentlich braucht…). Die Fahrzeuge hatten Motoren, die direkt mit der Empfängerplatine verbunden waren und an dieser war eben die Stromzufuhr und die Antenne fest. Diese Einfachheit hatte einen Vorteil für mich, nachdem ich das alles verstanden habe: Ich konnte die Steuerung für die Lenkung einfach für einen zweiten Antriebsmotor verwenden. Denn ich wollte aus den zwei Fahrzeugen eins machen und eine “Tank-style” Lenkung bauen, d.h.: Ich hatte zwei einzeln ansteuerbare Antriebsräder und brauche keine Lenkachse mehr. Dazu später mehr, einiges erklärt sich selbst auf den folgenden Bildern.
 Zunächst fing ich damit an, die Modelle von allem unnötigen Ballast zu befreien. Also z.B. die ganze Vorderachse weg. Das Chassis sowieso, denn zum einen taugt das dünne Plastik eh für nix und zum anderen wollte ich eine ganz speziell geformte, robuste Hülle über alles haben. Dann von beiden Modellen spiegelbildlich ein Hinterrad abgetrennt, damit ich die beiden Teile zu einem verbinden konnte. Die beiden E-Motoren, die ursprünglich für die Lenkung verantwortlich waren, habe ich auch abgelötet. Auf dem Bild kann man erkennen, dass nur noch eine Empfängerplatine eingesetzt ist (beim hinteren). Und deren Signalleitung für die Lenkung wollte ich einfach an den Antriebsmotor des anderen (vorn) setzen. Habe ich auch später gemacht und ging super! Nur die Polung musste ich noch mal tauschen, damit die Steuerung logischer wird (uups 😉 )
Zunächst fing ich damit an, die Modelle von allem unnötigen Ballast zu befreien. Also z.B. die ganze Vorderachse weg. Das Chassis sowieso, denn zum einen taugt das dünne Plastik eh für nix und zum anderen wollte ich eine ganz speziell geformte, robuste Hülle über alles haben. Dann von beiden Modellen spiegelbildlich ein Hinterrad abgetrennt, damit ich die beiden Teile zu einem verbinden konnte. Die beiden E-Motoren, die ursprünglich für die Lenkung verantwortlich waren, habe ich auch abgelötet. Auf dem Bild kann man erkennen, dass nur noch eine Empfängerplatine eingesetzt ist (beim hinteren). Und deren Signalleitung für die Lenkung wollte ich einfach an den Antriebsmotor des anderen (vorn) setzen. Habe ich auch später gemacht und ging super! Nur die Polung musste ich noch mal tauschen, damit die Steuerung logischer wird (uups 😉 )
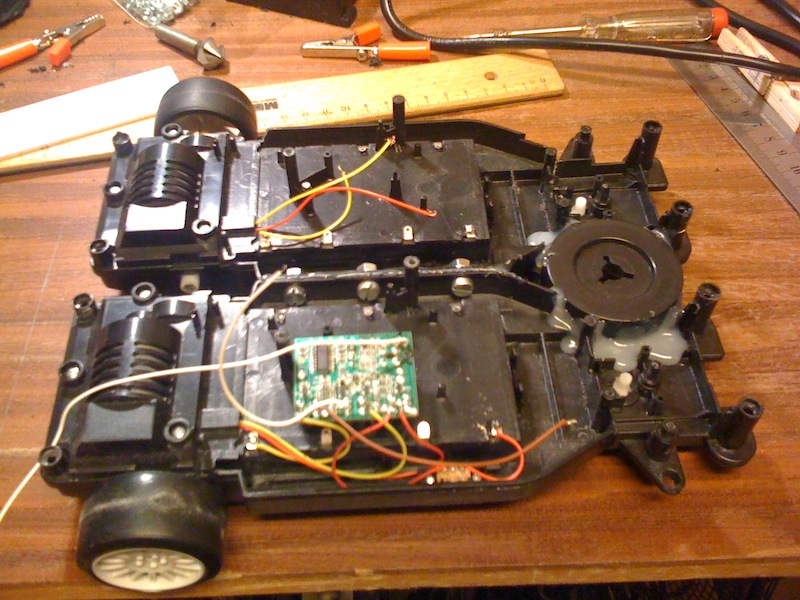 Auf dem nächsten Bild sieht man schon, wie die beiden Körper mit einander verschraubt sind. Das hat auch super gehalten. Ich wollte das ja auch nie wieder auseinander schrauben. Vorn habe ich dann statt einer Lenkachse eine Möbelrolle aus dem Baumarkt eingesetzt. Diese hat den Vorteil, dass sie sich immer selbst in die Richtung dreht, in die sie geschoben wird. Ausserdem war das eine massive Kunststoffwalze mit einem soliden Stahlbolzen als Achse. Ich habe vorher die Rolle auf die Fahrzeugkörper gelegt und mit einem Stift grob umzu gemalt. Dann einfach das überflüssige Kunststoff mit einem Dremel weggeschnitten. Passte erstaunlich präzise! Danach die Rolle von unten eingesetzt (sie hat einen Absatz am unteren Rand), so dass sie nicht “weg” kann, selbst wenn der Kleber nicht halten sollte. Wie man auf dem Bild erkennen kann wurde das alles großzügig mit Heizkleber fixiert. Damit war er schon so weit fahrbereit und ich konnte die Steuerung testen. Ging alles auf Anhieb, ein Glück! Im Nachhein stellte sich raus, dass die Räder etwas zu klein im Durchmesser waren, um auf hubbeligem Boden gut zu funktionieren. Ich habe dann noch jeweils ein Stück Fahrradschlauch über die Reifen gezogen, so dass ich mehr Grip bekam. Passte genau!
Auf dem nächsten Bild sieht man schon, wie die beiden Körper mit einander verschraubt sind. Das hat auch super gehalten. Ich wollte das ja auch nie wieder auseinander schrauben. Vorn habe ich dann statt einer Lenkachse eine Möbelrolle aus dem Baumarkt eingesetzt. Diese hat den Vorteil, dass sie sich immer selbst in die Richtung dreht, in die sie geschoben wird. Ausserdem war das eine massive Kunststoffwalze mit einem soliden Stahlbolzen als Achse. Ich habe vorher die Rolle auf die Fahrzeugkörper gelegt und mit einem Stift grob umzu gemalt. Dann einfach das überflüssige Kunststoff mit einem Dremel weggeschnitten. Passte erstaunlich präzise! Danach die Rolle von unten eingesetzt (sie hat einen Absatz am unteren Rand), so dass sie nicht “weg” kann, selbst wenn der Kleber nicht halten sollte. Wie man auf dem Bild erkennen kann wurde das alles großzügig mit Heizkleber fixiert. Damit war er schon so weit fahrbereit und ich konnte die Steuerung testen. Ging alles auf Anhieb, ein Glück! Im Nachhein stellte sich raus, dass die Räder etwas zu klein im Durchmesser waren, um auf hubbeligem Boden gut zu funktionieren. Ich habe dann noch jeweils ein Stück Fahrradschlauch über die Reifen gezogen, so dass ich mehr Grip bekam. Passte genau!
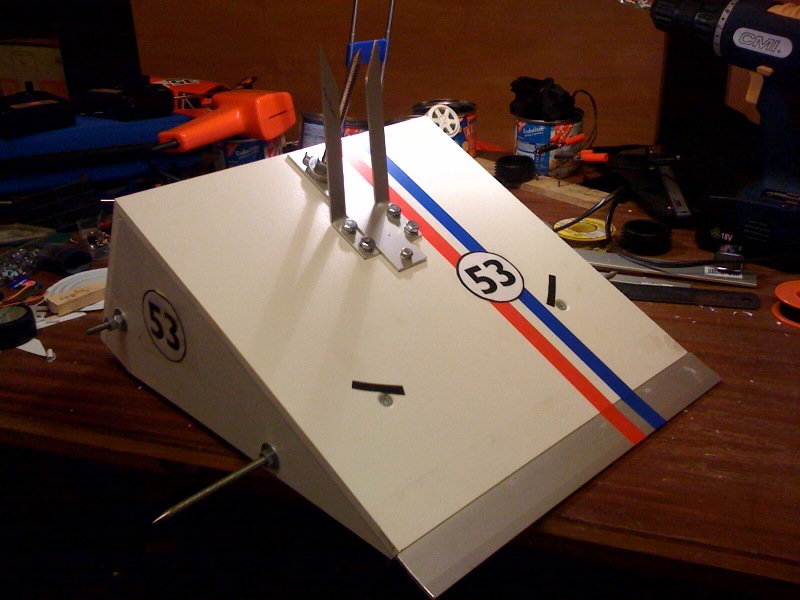
Mein Schwager Stephan baute mir aus soliden Kunststoffplatten einen Kasten nach meiner Vorgabe, siehe Bild oben vom fertigen Roboter. Die Idee war, dass ich bei den Gegnern mit Karacho in die Seite fahre, so meinen Bot da unter schieben kann und der Gegner umkippt. Dafür fehlte aber am Ende die Kraft. Das neue Chassis befestigte ich mit einer quer durchgehenden Gewindestange am Fahrweg, so konnte ich alles bequem aufklappen. Vorn am Chassis brachte ich mit Klebeband eine Aluleiste an, um die Bodenfreiheit zu überbrücken. Die ganzen spitzen Anbauteile waren nur Showeffekt, um den Gegner zu beeindrucken. Dann noch die „53“ ausgedruckt, mit farbigem Isolierband die Streifen angebracht und fertig war mein Bad Herbie.

Das war jetzt eine sehr reduzierte Beschreibung, aber auf jeden Fall war ich deutlich vor den 14 Tagen fertig und konnte sogar noch etwas fahren üben! Das es am Tag des Rennens, 20. Februar 2011, so kalt war, dass die Akkus nicht lange hielten, konnte ja keiner ahnen….
- 0
- 0
- 0